IBM Ferrari Hyperlap & Hyperdrive
I helped develop and design both IBM Ferrari activations with the team at FIELD.
Core responsibilities:
• Automotive rigging: Successfully implemented a telemetry-driven Control Rig using Blender and Unreal Engine, including an accurate F1 double wishbone suspension as well as a driver rig.
• Blueprint Logic: Authored logic to drive Control Rig and Animation from Shared Memory MQTT messages, as well as provide further telemetry to the back-end and database.
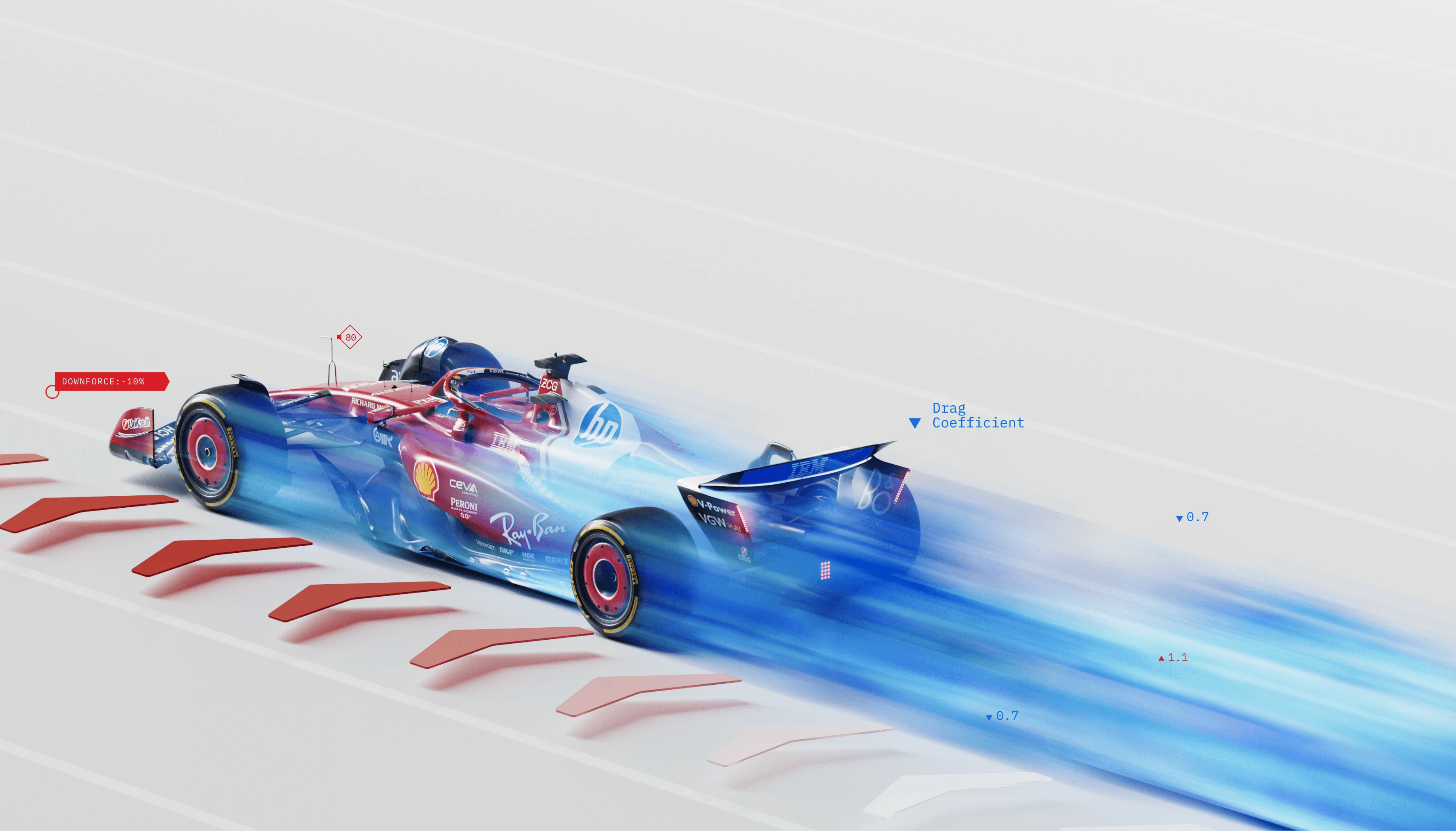
• UI: Employed UMG to design and implement dynamic state-driven UI elements to showcase and evaluate driver skill, such as braking zones, corner apex accuracy and velocity/downforce metrics.
• Optimization, debugging and rendering: Optimized highly-detailed incoming meshes including UDIMs to fit real-time budgets, developing an automated pipeline using SideFX Houdini. Debugged various asset, logic and rendering related issues alongside two other developers.
From FIELD.IO: "This is beyond a driving simulator, it’s a demonstration of speed + intelligence. When fans sit at the wheel, they grasp what we discovered with IBM + Ferrari — that dynamic intelligent systems can turn raw telemetry into rapid feedback + real-time understanding."
Interactive preview of the SF control rig
Control rig receiving inputs from real race telemetry
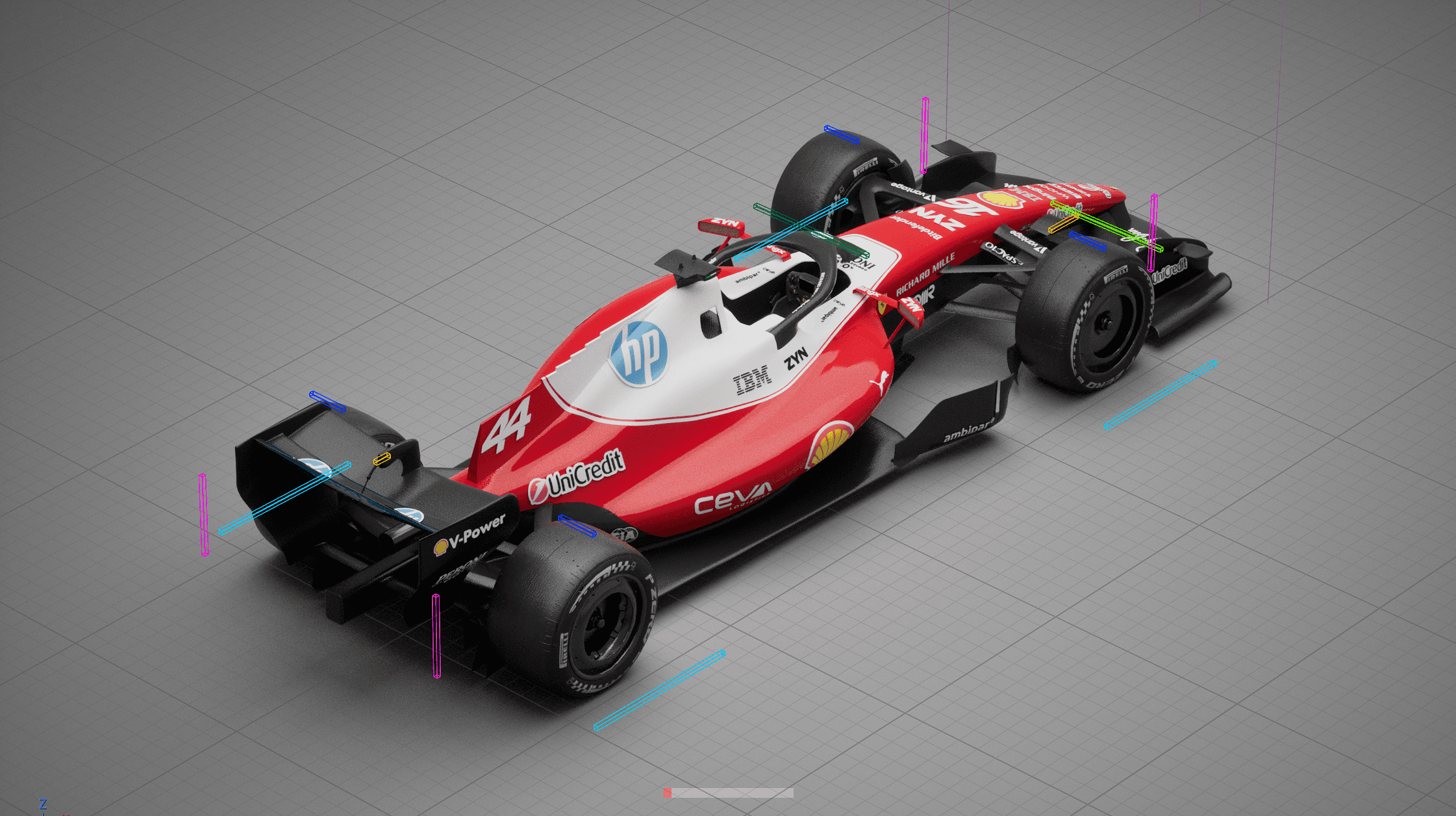
Preview of the SF control rig
Trailer from FIELD.IO "IBM: Ferrari"